Le robot en détails
DESCRIPTIF DÉTAILLÉ :
Avant d’utiliser le robot, il convient de charger ses batteries. Une simple prise USB sur votre ordinateur ou un chargeur USB dédié fera l’affaire. Une lumière rouge apparaitra alors près du connecteur micro-USB et l'indicateur du niveau de batterie augmentera. Une LED bleu s'allumera à proximité du connecteur micro-USB lorsque la charge sera complète.

Il suffit ensuite d'appuyer sur le rond central pour allumer le Tymio II, qui émet alors un son et s’éclaire de vert.
Lorsque vous souhaiterez éteindre le robot, il faudra de nouveau appuyer longuement sur le rond central.
Les fabricants ont prévu pour le Thymio II des « comportements de base »
Les « comportements de base » intégrés au robot sont accessibles en sélectionnant une couleur à l’aide des « boutons flèches » puis en appuyant sur le bouton central pour lancer le robot.
Les six « comportements de base » sont :
L'amical (vert)
Dans ce comportement, Thymio II suit un objet en face de lui. Ce peut-être une main, un autre robot ou objet mécanique.
https://aseba.wikidot.com/fr:thymiobehaviourfriendly
L'explorateur (jaune)
Dans ce comportement, Thymio II explore le monde tout en évitant les obstacles verticaux ou les trous.
https://aseba.wikidot.com/fr:thymiobehaviourexplorer
Le peureux (rouge)
Dans ce comportement, Thymio II recule si on s’approche. Il détecte également les chocs. Si on le tape, il réagit en émettant un bip sonore. Si on le soulève, il indique par une lumière la direction du sol. Il détecte également la chute libre.
https://aseba.wikidot.com/fr:thymiobehaviourfearful
L'enquêteur (turquoise)
Dans ce comportement, Thymio II roule sur une piste.
La piste doit être au minimum de 4cm de large être noire sur un fond blanc.
Lorsque le mode « enquêteur » est activé:
* En plaçant le robot sur le noir de la piste, puis en appuyant simultanément sur les flèches-boutons « avant » et « arrière » du robot, on calibre la
reconnaissance du noir.
* En plaçant le robot hors de la piste, sur le blanc, puis en appuyant
simultanément sur les flèches-boutons « gauche » et « droite » du robot on
calibre la reconnaissance du blanc.
https://aseba.wikidot.com/fr:thymiobehaviourinvestigator
L'obéissant (mauve)
Dans ce comportement, Thymio II suit les ordres donnés, à la volée par les boutons ou une télécommande. Il ne s’agit pas ici de programmation mais d’un processus du type : « une action-une exécution » plus proche de l’usage d’un jouet radiotélécommandé que d’un robot programmable.
Plusieurs télécommandes « universelles » permettent d’agir à distance sur ce Thymio II obéissant.
La liste et la configuration des télécommandes sont décrites ici :
https://aseba.wikidot.com/fr:thymioirremote
L'attentif (bleu)
Dans ce comportement, Thymio II réagit au son perçu. On peut commander le robot avec des clappements de main.
1 clap = tourne ou avance tout droit
2 claps = marche / arrêt
3 claps = fait un cercle
https://aseba.wikidot.com/fr:thymiobehaviourattentive
En plus ces « comportements de base » déjà très intéressants Thymio II peut être programmé afin de créer des comportements personnalisés.
L'outil de programmation de Thymio II est basé sur « Aseba » et nécessite un PC.
Aseba est un ensemble d'outils « open-source » permettant de programmer des robots facilement et efficacement. En effet, Aseba utilise un langage ergonomique et simple d'accès, à partir d'un environnement de développement intégré.
Il y a donc deux manières de programmer Thymio à partir d’Aseba :
1. Avec l'environnement graphique
La programmation graphique est la plus facile
Elle permet de mettre en relation des événements externes détectés par les capteurs du robot et des actions du robot
Lorsque la programmation visuelle est terminée, un code Aseba est automatiquement généré.
2. En écrivant directement le code.
Cette programmation est plus difficile mais permet de faire des choses plus
complexes...
On peut également partir d’un code Aseba généré automatiquement à partir de la programmation visuelle et le modifier
Nous retiendrons principalement le « mode de programmation graphique » Il faut avoir installé la version 1.2 (ou ultérieure) d'Aseba Studio, avoir connecté un robot Thymio II à l'ordinateur.
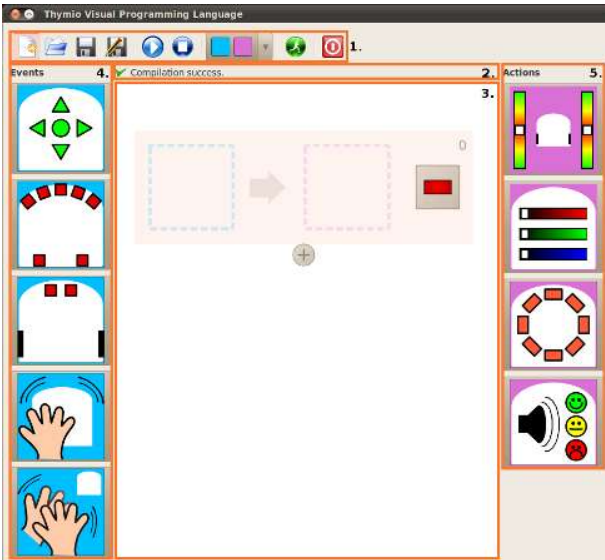
- La barre d'outils contient les boutons pour ouvrir et sauvegarder des fichiers, lancer ou arrêter l'exécution du programme, et changer de mode d'édition.
2. Cette ligne indique si les instructions sont correctes et complètes.
3. Cette zone est dédiée à l'écriture du code. Le code entré ici sert d'instructions au robot pour déterminer son comportement.
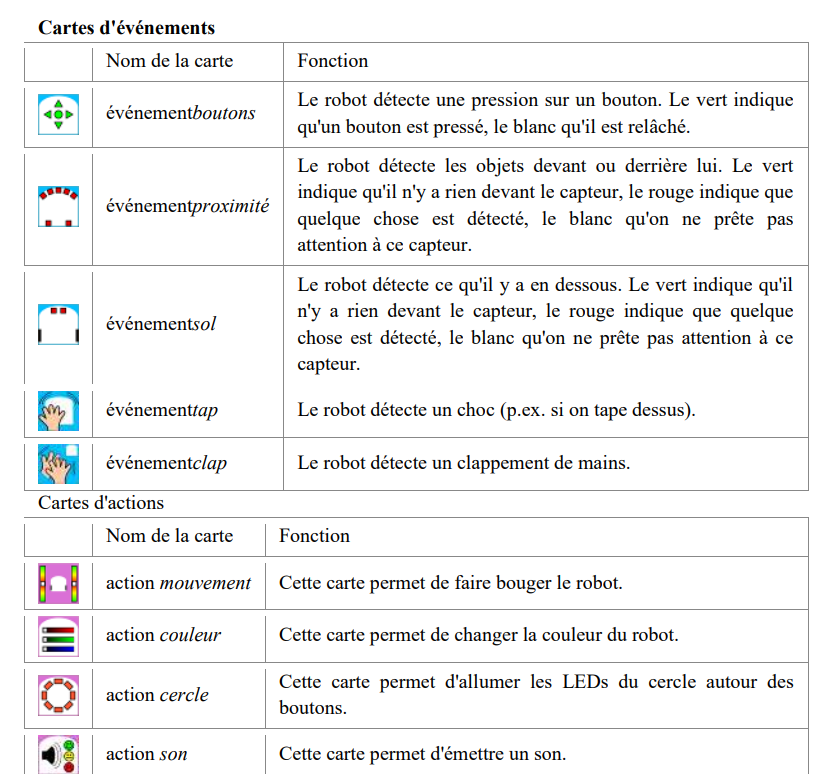
4. Les cartes d'événements déterminent quand le robot doit réagir. Ces cartes peuvent être ajoutées dans le code en les tirant dans la zone au centre.
5. Les cartes d'action déterminent comment le robot doit réagir. Ces cartes peuvent être ajoutées dans le code en les glissant dans la zone au centre.
Boutons de la barre d'outils
Les boutons de la barre d'outils sont décrits ici de gauche à droite.
nouveau : Ce bouton ouvre une nouvelle page vierge dans l'éditeur.
ouvrir : Ce bouton ouvre un fichier existant.
enregistrer : Ce bouton enregistre le code dans le fichier courant.
enregistrer sous : Ce bouton enregistre le code dans un fichier choisi par l'utilisateur.
charger et exécuter : Ce bouton charge et exécute le code.
arrêter : Ce bouton arrête le robot. Une fois qu'on arrête le robot, il faut recharger le code sur le robot avant de pouvoir le relancer.
schéma des couleurs : ce bouton change les couleurs des cartes d'événements et d'actions.
mode avancé : Ce bouton permet de passer dans le mode d'édition avancé.
quitter : Ce bouton permet de fermer le plug-in VPL.
Programmer
On peut programmer en mode graphique en cliquant simplement sur les cartes d'actions et d'événements et en les glissant dans la zone centrale. Chaque ligne du programme est formée d'une combinaison d'une carte d'événement (à gauche) et d'une carte d'action (à droite). Une ligne détermine quand (événement) le robot doit adopter quel comportement (action). Par exemple, une ligne composée de l'événement tap et de l'action mouvement dit au robot de bouger lorsqu'on tape dessus. Plusieurs lignes avec des instructions différentes peuvent être créées. Les lignes peuvent être glissées et réarrangées. Le bouton + insère une nouvelle ligne et le bouton - enlève la ligne choisie. Une fois que le programme est prêt, il faut appuyer sur le bouton charger et exécuter dans la barre d'outils pour le lancer.
En résumé, les étapes de la programmation graphique sont les suivantes:
1. Tirer une carte d'événement dans l'éditeur
2. Tirer une carte d'action dans l'éditeur
3. Répéter les étapes ci dessus jusqu'à ce que le comportement désiré soit complet.
4. Appuyer sur charger et exécuter et vérifier que le robot se comporte comme on l'attendait.
Exemples
L'exemple tap et clap change la couleur du robot en fonction de la détection de sons et de chocs. Le robot devient rose si on le tape, et éteint sa LED si on tape des mains.
Pour s'exercer on peut adapter ce code comme suit:
o Changer la couleur du robot en vert; la changer en jaune.
o Faire en sorte que le robot devienne bleu quand on tape des mains, et qu'il
s'éteigne quand on le tape.
o Allumer le cercle de LEDs quand le robot détecte un clappement de mains et éteindre le cercle quand on le tape.
L'exemple du sol fait bouger le robot d'après les capteurs au sol. Le robot avance si il est posé sur le sol et s'arrête en bord de table. Pour s'exercer on peut adapter ce code comme suit:
o Jouer le son "pas content" quand le robot est en bord de table.
o Allumer le robot en vert quand il est sur le sol et en rouge quand il est en bord de table.
o Faire tourner le robot à gauche quand le capteur au sol de gauche détecte la table et celui de droite du vide. Le faire tourner à droite quand le capteur au sol de droite détecte la table et celui de gauche du vide.
L'exemple des capteurs de proximité fait bouger le robot en fonction des capteurs de proximité horizontaux. Le robot avance s'il détecte quelque chose derrière, s'arrête si un obstacle est devant, tourne à gauche si on obstacle se trouve à droite et tourne à droite si un obstacle se trouve a gauche. Pour s'exercer on peut adapter ce code comme suit:
o Changer la couleur du robot pour chacun des mouvements - avant, arrière,
gauche, droite et stop.
o Faire reculer le robot quand un obstacle est détecté devant. Le faire s'arrêter quand on le tape.
L'exemple des boutons fait bouger le robot et change sa couleur en fonction des boutons (comme montré dans la vidéo). Le robot avance et devient rouge si on appuie sur le bouton avant, recule et devient bleu si on appuie sur le bouton arrière, et s'arrête si on appuie sur le bouton central. Pour s'exercer on peut adapter ce code comme suit:
o Arrêter le robot quand il détecte un obstacle devant lui.
o Faire tourner le robot à gauche quand il voit un obstacle à droite. le faire
tourner à droite quand il voit un obstacle à gauche.
o Arrêter le robot en bord de table.
Wireless Thymio
A partir des septembre 2016, une nouvelle version « sans fil » de Thymio II est disponible.
De même que le robot de plancher Bee Bot à évolué en 2016 vers une version sans fil utilisant le bluetooth et qui s’appelle Blue Bot, le robot Thymio II évolue vers une nouvelle version sans fil, le Wireless Thymio, qui présente de nombreux avantages pédagogiques :
Il est désormais possible de programmer le robot à distance et d’y envoyer son codage. Le Wireless Thymio reste alors sur sa surface de travail, s’affranchit de son cable USB et permet donc à l’élève de tester plus facilement et plus rapidement ses programmes.
Le robot Wireless Thymio peut être également stoppé à distance.
L’apport du wifi intégré permet à plusieurs robots de type Wireless Thymio de communiquer entre eux jusqu’à 50m de distance.
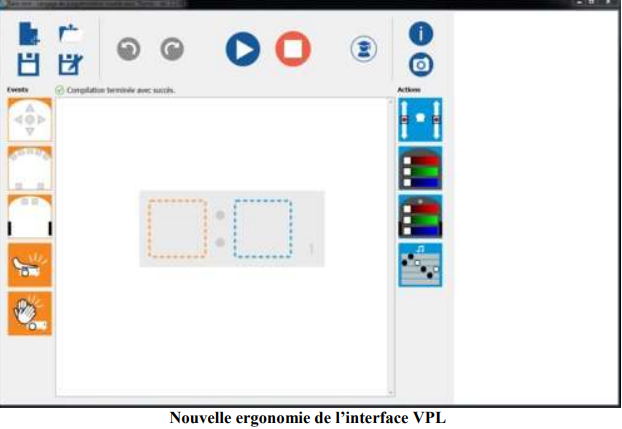
La nouvelle version de l’interface VPL (Aseba 1.5, sortie le 15/02/ 2016), permet, via la liaison sans fil, d’avoir un feedback en temps réel sur les différentes parties du code en train d’être exécutées par le robot et des données provenant des différents capteurs et moteurs.